 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgecrop row detection
Papers and Code
RowDetr: End-to-End Row Detection Using Polynomials
Dec 13, 2024



Crop row detection has garnered significant interest due to its critical role in enabling navigation in GPS-denied environments, such as under-canopy agricultural settings. To address this challenge, we propose RowDetr, an end-to-end neural network that utilizes smooth polynomial functions to delineate crop boundaries in image space. A novel energy-based loss function, PolyOptLoss, is introduced to enhance learning robustness, even with noisy labels. The proposed model demonstrates a 3% improvement over Agronav in key performance metrics while being six times faster, making it well-suited for real-time applications. Additionally, metrics from lane detection studies were adapted to comprehensively evaluate the system, showcasing its accuracy and adaptability in various scenarios.
RoWeeder: Unsupervised Weed Mapping through Crop-Row Detection
Oct 07, 2024



Precision agriculture relies heavily on effective weed management to ensure robust crop yields. This study presents RoWeeder, an innovative framework for unsupervised weed mapping that combines crop-row detection with a noise-resilient deep learning model. By leveraging crop-row information to create a pseudo-ground truth, our method trains a lightweight deep learning model capable of distinguishing between crops and weeds, even in the presence of noisy data. Evaluated on the WeedMap dataset, RoWeeder achieves an F1 score of 75.3, outperforming several baselines. Comprehensive ablation studies further validated the model's performance. By integrating RoWeeder with drone technology, farmers can conduct real-time aerial surveys, enabling precise weed management across large fields. The code is available at: \url{https://github.com/pasqualedem/RoWeeder}.
CropNav: a Framework for Autonomous Navigation in Real Farms
Nov 17, 2024



Small robots that can operate under the plant canopy can enable new possibilities in agriculture. However, unlike larger autonomous tractors, autonomous navigation for such under canopy robots remains an open challenge because Global Navigation Satellite System (GNSS) is unreliable under the plant canopy. We present a hybrid navigation system that autonomously switches between different sets of sensing modalities to enable full field navigation, both inside and outside of crop. By choosing the appropriate path reference source, the robot can accommodate for loss of GNSS signal quality and leverage row-crop structure to autonomously navigate. However, such switching can be tricky and difficult to execute over scale. Our system provides a solution by automatically switching between an exteroceptive sensing based system, such as Light Detection And Ranging (LiDAR) row-following navigation and waypoints path tracking. In addition, we show how our system can detect when the navigate fails and recover automatically extending the autonomous time and mitigating the necessity of human intervention. Our system shows an improvement of about 750 m per intervention over GNSS-based navigation and 500 m over row following navigation.
SPARROW: Smart Precision Agriculture Robot for Ridding of Weeds
May 31, 2024The advancements in precision agriculture are vital to support the increasing demand for global food supply. Precision spot spraying is a major step towards reducing chemical usage for pest and weed control in agriculture. A novel spot spraying algorithm that autonomously detects weeds and performs trajectory planning for the sprayer nozzle has been proposed. Furthermore, this research introduces a vision-based autonomous navigation system that operates through the detected crop row, effectively synchronizing with an autonomous spraying algorithm. This proposed system is characterized by its cost effectiveness that enable the autonomous spraying of herbicides onto detected weeds.
LiDAR-Based Crop Row Detection Algorithm for Over-Canopy Autonomous Navigation in Agriculture Fields
Mar 26, 2024
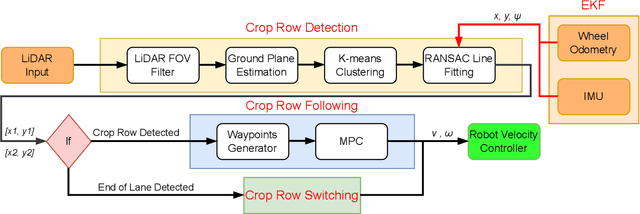


Autonomous navigation is crucial for various robotics applications in agriculture. However, many existing methods depend on RTK-GPS systems, which are expensive and susceptible to poor signal coverage. This paper introduces a state-of-the-art LiDAR-based navigation system that can achieve over-canopy autonomous navigation in row-crop fields, even when the canopy fully blocks the interrow spacing. Our crop row detection algorithm can detect crop rows across diverse scenarios, encompassing various crop types, growth stages, weed presence, and discontinuities within the crop rows. Without utilizing the global localization of the robot, our navigation system can perform autonomous navigation in these challenging scenarios, detect the end of the crop rows, and navigate to the next crop row autonomously, providing a crop-agnostic approach to navigate the whole row-crop field. This navigation system has undergone tests in various simulated agricultural fields, achieving an average of $2.98cm$ autonomous driving accuracy without human intervention on the custom Amiga robot. In addition, the qualitative results of our crop row detection algorithm from the actual soybean fields validate our LiDAR-based crop row detection algorithm's potential for practical agricultural applications.
Multispectral Image Segmentation in Agriculture: A Comprehensive Study on Fusion Approaches
Jul 31, 2023Multispectral imagery is frequently incorporated into agricultural tasks, providing valuable support for applications such as image segmentation, crop monitoring, field robotics, and yield estimation. From an image segmentation perspective, multispectral cameras can provide rich spectral information, helping with noise reduction and feature extraction. As such, this paper concentrates on the use of fusion approaches to enhance the segmentation process in agricultural applications. More specifically, in this work, we compare different fusion approaches by combining RGB and NDVI as inputs for crop row detection, which can be useful in autonomous robots operating in the field. The inputs are used individually as well as combined at different times of the process (early and late fusion) to perform classical and DL-based semantic segmentation. In this study, two agriculture-related datasets are subjected to analysis using both deep learning (DL)-based and classical segmentation methodologies. The experiments reveal that classical segmentation methods, utilizing techniques such as edge detection and thresholding, can effectively compete with DL-based algorithms, particularly in tasks requiring precise foreground-background separation. This suggests that traditional methods retain their efficacy in certain specialized applications within the agricultural domain. Moreover, among the fusion strategies examined, late fusion emerges as the most robust approach, demonstrating superiority in adaptability and effectiveness across varying segmentation scenarios. The dataset and code is available at https://github.com/Cybonic/MISAgriculture.git.
Crop Row Switching for Vision-Based Navigation: A Comprehensive Approach for Efficient Crop Field Navigation
Sep 21, 2023



Vision-based mobile robot navigation systems in arable fields are mostly limited to in-row navigation. The process of switching from one crop row to the next in such systems is often aided by GNSS sensors or multiple camera setups. This paper presents a novel vision-based crop row-switching algorithm that enables a mobile robot to navigate an entire field of arable crops using a single front-mounted camera. The proposed row-switching manoeuvre uses deep learning-based RGB image segmentation and depth data to detect the end of the crop row, and re-entry point to the next crop row which would be used in a multi-state row switching pipeline. Each state of this pipeline use visual feedback or wheel odometry of the robot to successfully navigate towards the next crop row. The proposed crop row navigation pipeline was tested in a real sugar beet field containing crop rows with discontinuities, varying light levels, shadows and irregular headland surfaces. The robot could successfully exit from one crop row and re-enter the next crop row using the proposed pipeline with absolute median errors averaging at 19.25 cm and 6.77{\deg} for linear and rotational steps of the proposed manoeuvre.
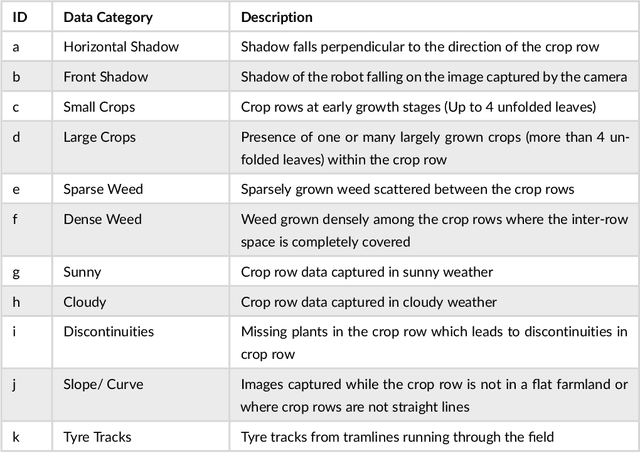
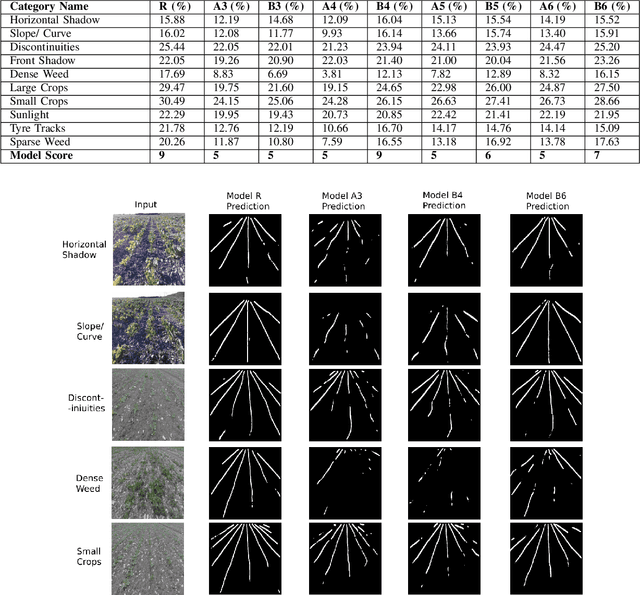
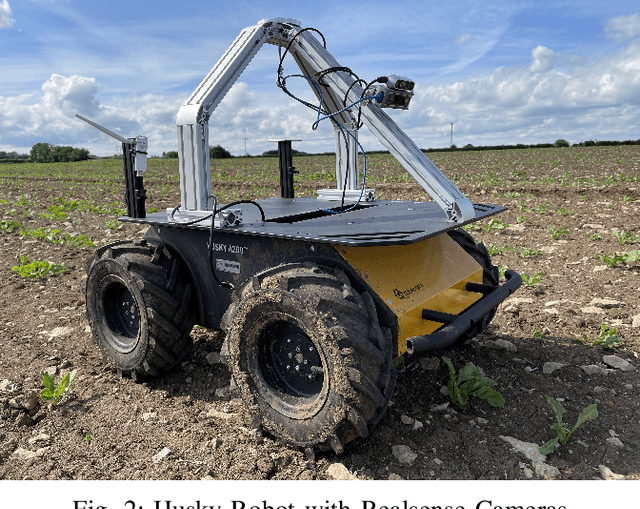
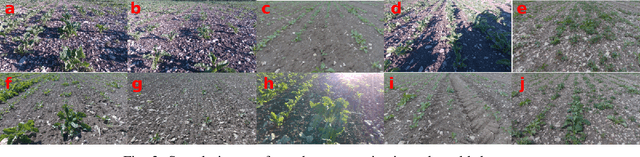
Vision based Crop Row Navigation under Varying Field Conditions in Arable Fields
Sep 28, 2022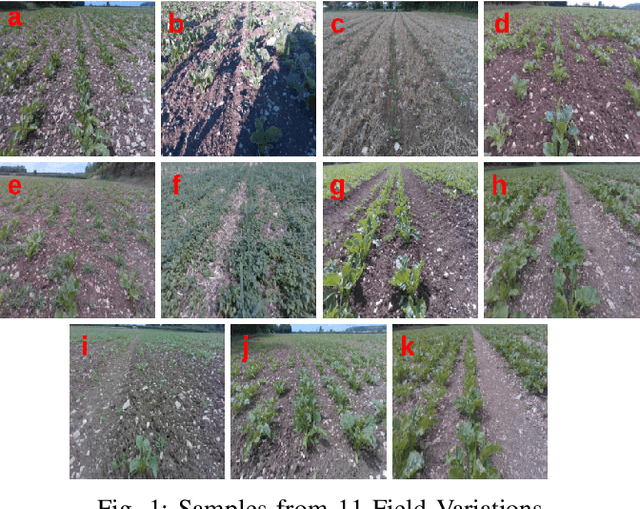

Accurate crop row detection is often challenged by the varying field conditions present in real-world arable fields. Traditional colour based segmentation is unable to cater for all such variations. The lack of comprehensive datasets in agricultural environments limits the researchers from developing robust segmentation models to detect crop rows. We present a dataset for crop row detection with 11 field variations from Sugar Beet and Maize crops. We also present a novel crop row detection algorithm for visual servoing in crop row fields. Our algorithm can detect crop rows against varying field conditions such as curved crop rows, weed presence, discontinuities, growth stages, tramlines, shadows and light levels. Our method only uses RGB images from a front-mounted camera on a Husky robot to predict crop rows. Our method outperformed the classic colour based crop row detection baseline. Dense weed presence within inter-row space and discontinuities in crop rows were the most challenging field conditions for our crop row detection algorithm. Our method can detect the end of the crop row and navigate the robot towards the headland area when it reaches the end of the crop row.
Deep learning-based Crop Row Following for Infield Navigation of Agri-Robots
Sep 09, 2022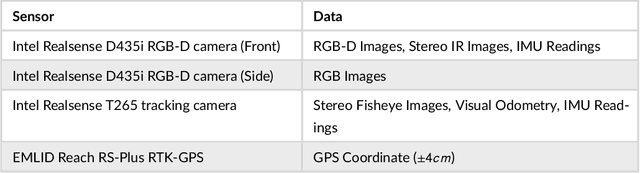
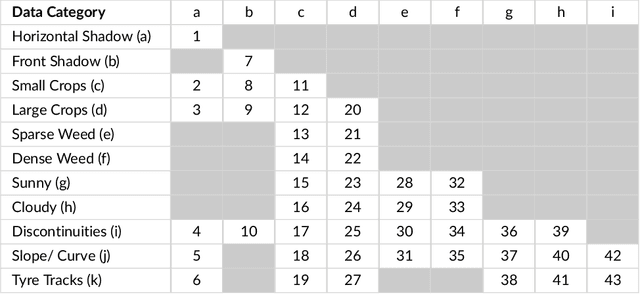
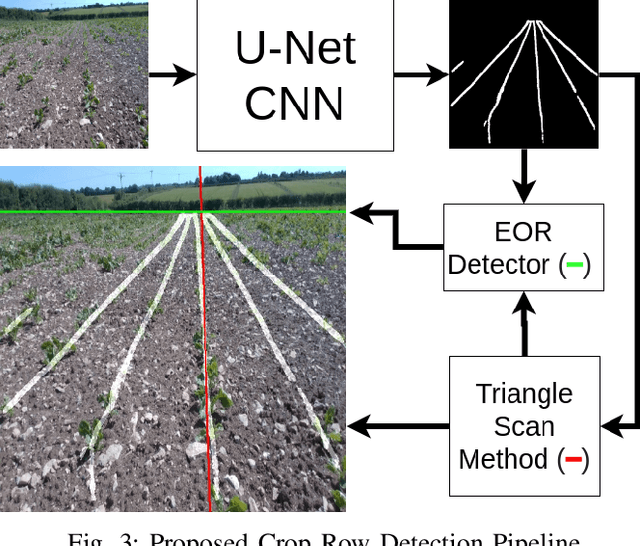
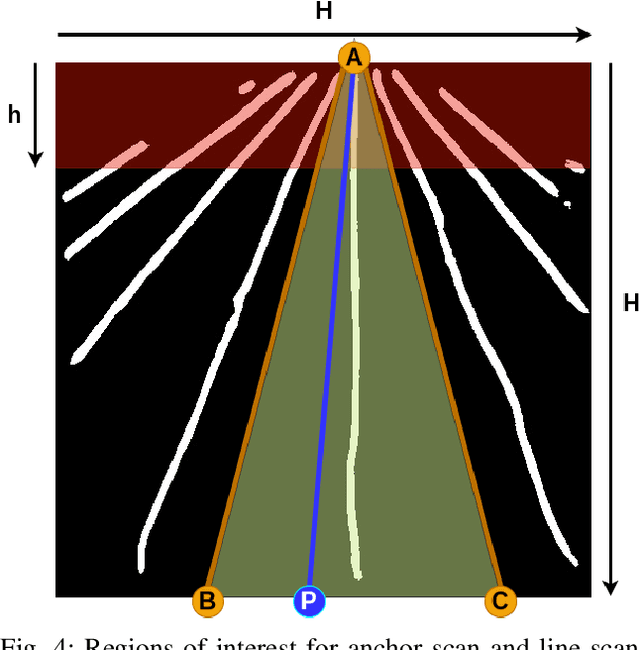
Autonomous navigation in agricultural environments is often challenged by varying field conditions that may arise in arable fields. The state-of-the-art solutions for autonomous navigation in these agricultural environments will require expensive hardware such as RTK-GPS. This paper presents a robust crop row detection algorithm that can withstand those variations while detecting crop rows for visual servoing. A dataset of sugar beet images was created with 43 combinations of 11 field variations found in arable fields. The novel crop row detection algorithm is tested both for the crop row detection performance and also the capability of visual servoing along a crop row. The algorithm only uses RGB images as input and a convolutional neural network was used to predict crop row masks. Our algorithm outperformed the baseline method which uses colour-based segmentation for all the combinations of field variations. We use a combined performance indicator that accounts for the angular and displacement errors of the crop row detection. Our algorithm exhibited the worst performance during the early growth stages of the crop.
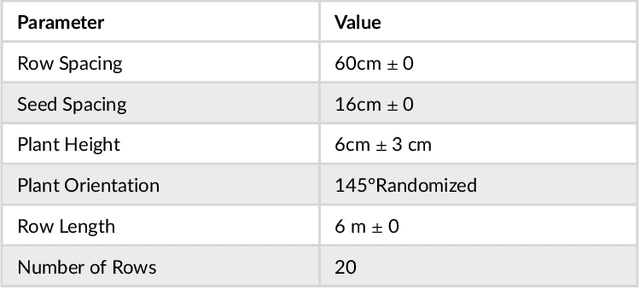
Towards Infield Navigation: leveraging simulated data for crop row detection
Apr 04, 2022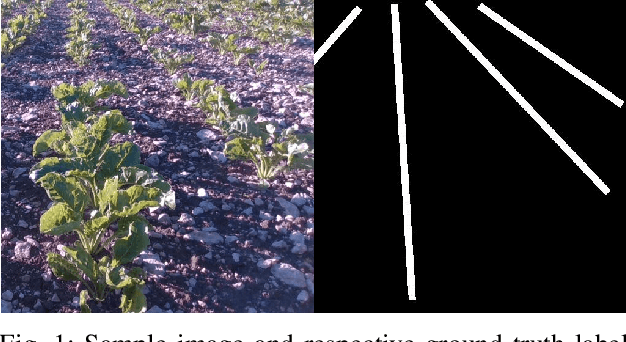
Agricultural datasets for crop row detection are often bound by their limited number of images. This restricts the researchers from developing deep learning based models for precision agricultural tasks involving crop row detection. We suggest the utilization of small real-world datasets along with additional data generated by simulations to yield similar crop row detection performance as that of a model trained with a large real world dataset. Our method could reach the performance of a deep learning based crop row detection model trained with real-world data by using 60% less labelled real-world data. Our model performed well against field variations such as shadows, sunlight and grow stages. We introduce an automated pipeline to generate labelled images for crop row detection in simulation domain. An extensive comparison is done to analyze the contribution of simulated data towards reaching robust crop row detection in various real-world field scenarios.